

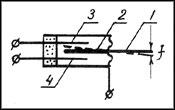
سنسور الکترودی
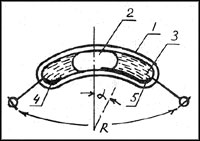
این سنسور از یک تیوب کشسان که داخل آن با یک ماده الکترولیت پر شده و در دو انتهای آن نیز دو الکترود قرار دارد، تشکیل شده است. این سنسور معمولا برای اندازه گیری جابجایی در محیط های خشن مورد استفاده قرار می گیرد. تغییر فاصله بین دو الکترود باعث تغییر مقاومت تیوب می گردد، بنابراین مقاومت با میزان کشیدگی تیوب متناسب خواهد بود.

سنسور الکترودی، f= جابجایی، R= مقاومت، 1= تیوب کشسان، 2= الکترولیت، 3و4= الکترود.
پتانسیومتر الکترولیتی
این سنسور شامل یک تیوب منحنی شکل می باشد که در داخل آن مایع الکترولیت قرار دارد. در داخل این تیوب یک حباب هوا نیز محبوس شده و در دو انتهای آن نیز دو الکترود تعبیه شده است. این سیستم شبیه به یک شاقول می باشد که برای پیدا کردن سطح افق مورد استفاده قرار می گیرد. جابجایی تیوب باعث می شود که حباب حرکت کند، در نتیجه امپدانس بین دو الکترود نیز تغییر می کند. بنابراین با اندازه گیری امپدانس می توان جابجایی نسبت به سطح افق را اندازه گیری نمود.
پتانسیومتر الکترولیت، a= جابجایی زاویه ای، R= مقاومت، 1= تیوب خمیده، 2= هوای داخل تیوب، 3= الکترولیت، 4= و5= الکترود.
سنسور اثر هال
سنسور هال از یک صفحه نیمه هادی در داخل یک میدان مغناطیسی غیر یکنواخت که توسط دو قطب از جنس ماده مغناطیس دائم به وجود آمده، تشکیل شده است. یک جریان الکتریکی ثابت از داخل صفحه عبور می کند و یک ولتاژ عمود بر سطح صفحه در آن القا می کند که به آن ولتاژ هال گویند. این ولتاژ با میزان چگالی شار متناسب می باشد و در نتیجه برای میدان غیر یکنواخت با میزان جابجایی متناسب خواهد بود.
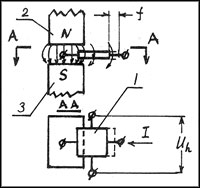
سنسور اثر هال، f= جابجایی، I= جریان، Uh= ولتاژ هال، 1= صفحه نیمه هادی، 2و3= دو قطب ماده مغناطیسی دائم.
سنسور یونی
سنسور یونی از یک تیوب که داخل آن با گاز پر شده و دو الکترود مسطح در داخل آن تشکیل شده است. این تیوب بین دو صفحه که متصل به یک منبع ولتاژ در فرکانس رادیویی می باشد، قرار می گیرد. این ولتاژ به اندازه کافی زیاد می باشد تا بتواند باعث داغ شدن گاز داخل تیوب شود. وقتی که تیوب در وسط دو صفحه خارجی قرار دارد، اختلاف پتانسیل بین الکترودها صفر می شود. جابجایی تیوب از موقعیت مرکزی باعث به وجود آمدن یک اختلاف پتانسیل می شود که با میزان جابجایی متناسب است.
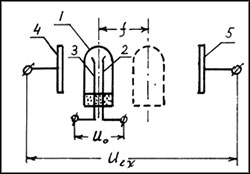
سنسور یونی، f= جابجایی، Uex= منبع ولتاژ با فرکانس رادیویی، 1= تیوب پر از گاز، 2و3= الکترودهای مسطح، 4و5= صفحات خارجی
لیدار
سیستم لیدار از یک لیزر مبتنی بر یاقوت که پالس های مادون قرمز قوی تولید می کند، تشکیل شده است. این تکنیک برای اندازه گیری فاصله تا شی مورد نظر استفاده می شود. اساس عملکرد آن به صورت اندازه گیری پرتو بازگشتی از شی می باشد.
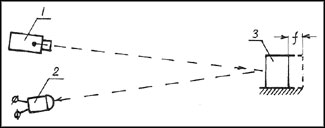
لیدار، f= جابجایی، 1= لیزر یاقوت، 2= گیرنده مادون قرمز، 3= شی
رادار مایکروویو
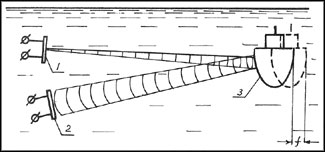
اساس این سیستم نیز بسیار ساده است. در این سنسور یک پرتو مایکروویو به سمت شی ارسال می شود و مدت زمانی که پرتو از شی بازتابش پیدا می کند، اندازه گیری می شود. این سنسور دارای آنتن های جداگانه ای برای ارسال و دریافت پرتو می باشد.
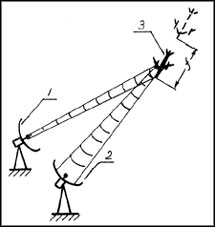
رادار مایکروویو، f= جابجایی، 1و2= آنتن های مایکروویو برای ارسال و دریافت پالس، 3= هدف
سنسورهای پیزوالکتریک
سنسورهای پیزوالکتریک حاوی یک دیسک با الکترودهایی بر سطح آن می باشد. جنس این صفحه به صورتی است که بار الکتریکی بر روی سطح آن متناسب است با تغییر شکل صفحه.
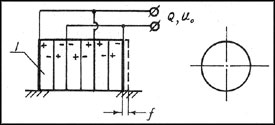
سنسور پیزوالکتریک، f= تغییر شکل، Q or Uo= بار و یا ولتاژ در خروجی، 1= مجموعه ای از پیزوکریستال ها
سوئیچ های اندازه گیری موقعیت
در این سنسورها:
1- وقتی که یک قطعه متحرک به یک موقعیت خاص می رسد، یک کنتاکت الکتریکی باز و یا بسته می شود.
2- وقتی که یک ماده مغناطیس دائم برروی قطعه متحرک قرار بگیرد، با رسیدن به یک سنسور اثر هال، تولید ولتاژ می نماید.
3- وقتی که یک قطعه فلزی برروی قطعه متحرک نزدیک یک سنسور جریان ادی شود، اندوکتانس آن به طور ناگهانی تغییر می کند.
4- وقتی که شی متحرک به یک نقطه مشخص برسد، یک شعاع نوری را قطع می کند. با استفاده از یک سنسور فتودتکتور می توان این قطع شدن نور را تشخیص داد.
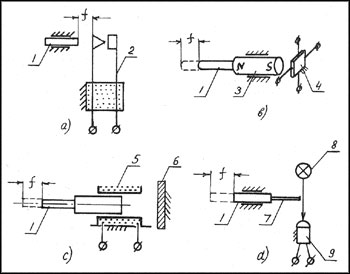
سوئیچ های تشخیص موقعیت، a تا d= سنسورهای تشخیص موقعیت با استفاده از سنسورهای مختلف، f= جابجایی، 1= شفت، 2= کنتاکت، 3= ماده مغناطیس دائم، 4= سنسور اثر هال، 5= سیم پیچ، 6= قطعه فلزی، 7= شاتر، 8= منبع نور، 9= سنسور نوری
شیر دیودی ترمویونیک
این شیر دیودی دارای یک آند متحرک می باشد که می تواند برای اندازه گیری جابجایی مورد استفاده قرار گیرد. جریان در این نوع دیود با تغییر بین کاتد و آند کنترل می شود. آند توسط یک پین اندازه گیری درایو می شود که یک طرف آن به آند وصل می باشد و طرف دیگر آن از داخل پوشش شیر بیرون آمده است. این قسمت برای اتصال به شی متحرک مورد استفاده قرار می گیرد.
شیر دیودی ترمویونیک، f= جابجایی، 1= پین اندازه گیری، 2= آند، 3و4= کاتد
سنسورهای آلتراسونیک
این سنسورها برای اندازه گیری فاصله مورد استفاده قرار می گیرند. در این سنسورها یک قطعه پیزوالکتریک پالس های صوتی را به سمت هدف ارسال می کند. سیگنال بازتابش شده از هدف به سمت سنسور بر می گردد و اندازه گیری می شود. زمان بین ارسال و دریافت پالس صوتی متناسب است با فاصله بین سنسور و هدف.
سنسور آلتراسونیک، f= جابجایی، 1و2= فرستنده و گیرنده، 3= هدف